4.1 無人航空機の機体の特徴(機体種類別)【教則学習】
2023年1月2日
2025年2月28日
4. 無人航空機のシステム 4.1 無人航空機の機体の特徴(機体種類別)

無⼈航空機操縦士の学科試験の受験の為の学習資料としてのご利用は下記の最新版「第3版」をご覧ください。
4.1 無人航空機の機体の特徴(機体種類別)【教則学習(第3版)】
「無人航空機の飛行の安全に関する教則」(第3版) 令和5年(2023年)4月13日【教則学習】目次
教則の本文を黒色に、独自に追記した補足説明や注釈を別色で記載しています。
4.1.1 無人航空機の種類と特徴
回転翼航空機(マルチローター)、回転翼航空機(ヘリコプター)及び飛行機などが該当する。
回転翼航空機(マルチローター)及び回転翼航空機(ヘリコプター)は、垂直離着陸や空中でのホバリングが可能という特徴がある。一方で、飛行機は、垂直離着陸やホバリングはできないが、回転翼航空機に比べ、飛行速度が速く、エネルギー効率が高いため、長距離・長時間の飛行が可能という特徴がある。さらに、回転翼航空機のように垂直離着陸が可能で、巡行中は飛行機のように前進飛行が可能となる、両方の特徴を組み合わせたパワードリフト機(Powered-lift)もある。
パワード・リフト機は、離着陸時は垂直離着陸を行い、水平飛行には固定翼を用いる航空機で、ヘリコプターなど同じように長い滑走路がなくても離着陸でき、かつ、固定翼機と同じくらいの飛行の速度性能を持った機体です。ヘリコプター固定翼の飛行機の良い所取りした比較的新しい技術で実現された機体です。
一般的に知られているのは、ベル・ボーイング V-22オスプレイのようなティルトローターの機体ではないでしょうか。垂直離着陸には、推力が上方を向くようにローターが傾けられ、水平飛行には固定翼の揚力を用いるように転換を行う航空機です。このほかに、ティルトウイングと呼ばれる、ロータが翼に固定されており、ローターだけではなく、翼全体が垂直から水平まで傾くようになっている機体もあります。これらの、ティルトローター、ティルトウイングなどを合わせてコンバーチプレーンと分類します。また、英国の戦闘機、ハリアーのようなダイレクト・スラストと呼ばれる垂直離着陸ジェット機なども、パワード・リフト機に分類されます。
一般的に知られているのは、ベル・ボーイング V-22オスプレイのようなティルトローターの機体ではないでしょうか。垂直離着陸には、推力が上方を向くようにローターが傾けられ、水平飛行には固定翼の揚力を用いるように転換を行う航空機です。このほかに、ティルトウイングと呼ばれる、ロータが翼に固定されており、ローターだけではなく、翼全体が垂直から水平まで傾くようになっている機体もあります。これらの、ティルトローター、ティルトウイングなどを合わせてコンバーチプレーンと分類します。また、英国の戦闘機、ハリアーのようなダイレクト・スラストと呼ばれる垂直離着陸ジェット機なども、パワード・リフト機に分類されます。
4.1.2 飛行機
(1) 機体の特徴
飛行機は回転翼航空機と比べ高速飛行、長時間飛行、長距離飛行が可能であるが、一般に、安全に飛行できる最低速度が決められており、それ未満での低速飛行ができない。水平離着陸には広いエリアが必要であり、高度な操縦技能と飛行制御技術が必要である。一方、適切な機体設計によって無操縦・無制御でも飛行安定が達成でき、仮に故障などによって飛行中に推力を失っても滑空飛行状態になれば、すぐには墜落しない。
飛行機は、翼に揚力を発生させて自重を支えることができるのが特徴である。このため比較的少ないエネルギーで飛行し、長距離飛行が可能になる。エレベーター(上下ピッチ方向)、エルロン(左右ロール方向)、ラダー(左右ヨー方向)、スロットル(推進パワー)の複合的な操縦で飛行する。離着陸には機体のサイズに合わせた滑走路が必要となる。滑空するため墜落、不時着する場合の落下地点を狭い範囲に抑えることができない。推力により前進し空気を掴み揚力が生まれるので、回転翼航空機とは違いホバリングや後退、横移動はできない。横方向の移動はバンクターン(旋回)で行う。姿勢安定装置を使用しない場合はバンクターンの操作はエルロンとエレベーターの複合である。過度の低速飛行や過度の上
昇角度、過度の旋回半径小により翼面から空気が剥離する失速という状態に陥ることがある。失速時は舵の操作が効かなくなる。これは飛行機にとって極めて危険な状態である。失速を回避するためにも操縦には高い技能が求められる。特に技能が必要なのは手動操縦における離着陸である。
離着陸含めて自動飛行を行う場合は、発射装置や回収装置などの地上設備が必要となる場合がある。
「横方向の移動はバンクターン(旋回)で行う」とは、自動車と同じ感覚で捉えると、わかりやすいのではないでしょうか、進みながらでしか、曲がることができません。速度0で横方向へカニ走行ができないのと同じイメージです。
失速とは、ストール(Stall)とも呼ばれ、翼の迎え角[angle of attack, AoA](流体の流れに対してどれだけ翼が傾いているかという角度をあらわす値)を大きくし過ぎた際に、翼の抵抗が急増し、それに伴い翼の表面を流れていた気流が剥離し、揚力をほとんど生みだせなくなる現象の事を言います。
失速とは、ストール(Stall)とも呼ばれ、翼の迎え角[angle of attack, AoA](流体の流れに対してどれだけ翼が傾いているかという角度をあらわす値)を大きくし過ぎた際に、翼の抵抗が急増し、それに伴い翼の表面を流れていた気流が剥離し、揚力をほとんど生みだせなくなる現象の事を言います。
エレベーター(上下ピッチ方向)、エルロン(左右ロール方向)、ラダー(左右ヨー方向)、スロットル(推進パワー)
舵と機体の方向につての用語です。フライト中に監視者や監督者から指示を出された場合とっさに対応できるよう、直感的に理解できる様に、ならなければならないことだと思います。
エレベーター[elevator ](上下ピッチ[pitch]方向)昇降舵とも呼ばれます。 機体の機首上げ、機首下げの姿勢にする為に使われます。 主翼 と 尾翼 を備えた一般的な形状の飛行機では、 水平尾翼後部の動翼(動く部分)が昇降舵になる。余談になりますが、建物内にあるエレベーターは日本語では昇降機と呼ばれ、人や荷物を載せて上下に移動させる装置ですが、上げたり下げたりする点では同一の意味を持ちます。ただし、航空機の場合は昇降舵を上げ下げすることによって、機体の頭を上げ下げする結果を得るものですので、機体を上げ下げするとは意味合いが異なる場合がありますので、注意が必要です。例えば、機体を垂直方向に上げ下げすることは飛行機では、不可能ですが、ヘリコプターなどの回転翼機では可能です。
マルチコプターでの機体を垂直方向への上げ下げはスロットル(動力の出力制御)で行います。このように、エレベーター = 垂直移動という認識をしてしまうと、混乱のもとになりますので注意が必要です。
エルロン[Aileron](左右ロール[roll]方向)補助翼と呼ばれます。フランス語で「小さな翼」を語源としています。説明的に水平方向舵とよばれています。飛行機をバンク(横転、ロール)させるのに使う動翼である。エルロンと表記することも多い。左右の主翼後縁の外側に取り付けられており、補助翼は機体の前後軸を中心とした回転運動を制御します。
ラダー[Rudder](左右ヨー[yaw]方向)は、もともとは船舶で舵の事を示していましたが、航空機や自動車などでも、進行方向を変える操作を示す言葉として用いられるようになりました。方向舵とも呼ばれ、垂直尾翼後部にある翼型の可動部分で、機体の左右の首振り運動(ヨーイング)を制御する舵の事です。
スロットル[Throttle](推進パワー)は流路断面積を変化させて流量を制御する装置の事を表します。もともとは、機体のエンジンへ供給する燃料の流量を制御を制御することから、結果としてエンジンの出力を上げたり下げたり制御するという意味です。電動機に関しても、モーターの出力(回転数)の上げ下げの制御に関する用語として踏襲されています。
 航空機機体の方向の名称
航空機機体の方向の名称

飛行機の運動軸の定義
X軸:飛行機の前後方向 (前方向が正)
Y軸:飛行機の左右方向 (右方向が正)
Z軸:飛行機の上下方向 (下方向が正)
(2) 大型機(最大離陸重量 25kg 以上)の特徴
大型機(最大離陸重量 25kg 以上)は主翼面積が大きくなるため、よりペイロード(積載可能重量)を大きくすることができる。ガソリンエンジンなど推進動力の選択肢も広がるのでより長距離・長時間飛行も可能になる。25kg 未満の飛行機に比べて風の影響も受けにくくなる。大型機は、事故発生時の影響が大きいことから、操縦者の運航への習熟度及び安全運航意識が十分に高いことが要求される。大型機は機体の慣性力が大きいことから、増速・減速・上昇・降下などに要する時間と距離が長くなるため、障害物回避には特に注意が必要である。緊急着陸地点の選定も小型機より広い範囲が必要となる。一般に小型の機体よりも騒音が大きくなるため、飛行ルート周囲への配慮が必要である。
4.1.3 回転翼航空機(ヘリコプター)
(1) 機体の特徴
回転翼航空機(ヘリコプター)は、垂直離着陸、ホバリング、低速飛行が可能であるが、これには大きなエネルギー消費がともない、風の影響を受けやすい。同じ回転翼航空機であるヘリコプター型とマルチローター型で比べると、ヘリコプター型は1組のローターで揚力を発生させるため、回転翼航空機(マルチローター)に比べローターの直径が大きく、空力的に効率良く揚力を得る事が出来る。
回転翼航空機(ヘリコプター)においては以下に示すような機構が必要であり、構造的に複雑となっている。
● ローターの回転面を傾けたり(機体を前後左右に運動させる場合)、ローターピッチ角を変えたり(上昇・降下させる場合)するために必要な機構(スワッシュプレート等)
● ローターの反トルクを打ち消したり、向き(ヨー方向)を変える操縦に用いたりするテールローター

ヘリコプター機体のコントロールをする場合、方向は飛行機で呼ばれるものとほぼ同じですが、構造的、動作的に異なることから、独特のものがあります。まず、機体を空に浮かばせるために、回転するメイン・ローターブレードから揚力を得て飛行します。このメイン・ローターは、ほとんどのヘリコプター(有人機体)の場合、上方から見て反時計方向に回転していますが、フランスおよびロシア製のヘリコプターでは時計方向に回転します。ラジコン模型のヘリコプターも、時計方向に回転するものが大半です。シングル・ローター・ヘリコプターにおいては、エンジンがローターを回転させることにより生じる、トルク効果(作用反作用の法則)によって、機体がローターの回転方向と反対方向に回転しようとします。それを抑えるために、テール・ローターがあり、テール・ローターによって、アンチトルク[Anti torque]と呼ばれる反作用トルクを打ち消す力を得て機体を安定させます。また、テール・ローターの出力をコントロールすることで機首の方向をコントロールすることができます。飛行機で言うと方向舵の役割を果たすことになります。
ヘリコプターでの機体の制御はメインローターの羽の角度と、テールローターの羽の角度です。勘違いしがちなのはローターの回転数は一般的に一定(マルチローター機との違い)ですので注意が必要です。
ヘリコプターでの機体の制御はメインローターの羽の角度と、テールローターの羽の角度です。勘違いしがちなのはローターの回転数は一般的に一定(マルチローター機との違い)ですので注意が必要です。

(2) 大型機(最大離陸重量 25kg 以上)の特徴
回転翼航空機(ヘリコプター)において最大離陸重量 25kg 以上の大型機では慣性力が大きく操舵時の機体挙動が遅れ気味になるため、特に定点で位置を維持するホバリングでは早めに操舵することが必要となる。また一般的に小型の機体よりエンジン騒音やローター騒音が大きくなる。
4.1.4 回転翼航空機(マルチローター)
(1)機体の特徴
回転翼航空機(マルチローター)は機体外周に配置されたローターを高速回転させ、上昇・降下や前後左右移動、ホバリングや機体を水平回転させることが出来る。大きなエネルギー消費により、複数のローターを高速回転させ揚力を得て飛行するが、風の影響を受けやすく飛行の安定性を高めるため、フライトコントロールシステムを用いローターの回転数を制御し、機体の姿勢や位置を安定させている。
操縦は送信機に備わるコントロールスティック等を操作して行う。
ローターの数によってそれぞれ呼称が異なる(ローターの数 4:クワッドコプター、6:ヘキサコプター 8:オクトコプター)。
モーター性能を同一とした場合、ローターの数が多いほど故障に対する耐性が向上し、ペイロード(積載可能重量)が増える。
ローターの回転方向は、時計回転(CW:クロックワイズ)と反時計回転(CCW:カウンタークロックワイズ)の方向で構成され、反トルクによりの機体の回転バランスを保っている。
ロータの数と名称の関係に関して詳しくは
「マルチコプター(multicopter)における「〇〇〇コプター」の由来について 」で説明しています。
」で説明しています。
ヘリコプターではメインローターとテールローターで姿勢を制御する為、ブレードの角度の制御なども行っていますが、マルチローター機では固定したブレードで、複数のブレードの回転数によって方向の制御を行っています。したがって、フライトコントコントローラーが必須になります。
万一、ローターの一つ、または複数が不調になった場合でも飛行を維持することができるのは、ロータの数がより多くあるためでもあります。しかし、ローターを増やすことによる、重量の増加、コストの増加とのトレードオフの関係にあります。また、ペイロードを増やすために、ローターを増やすという選択をされる機体もあるようです。マルチコプターはヘリコプターの様にテールロータがないため、隣り合うローターの回転方向を、逆方向にすることによって、アンチトルクを得て、機体の回転バランスを保っています。
「無人航空機の飛行の安全に関する教則」 令和4(2022)年11月2日第2版【教則学習】目次「マルチコプター(multicopter)における「〇〇〇コプター」の由来について
ヘリコプターではメインローターとテールローターで姿勢を制御する為、ブレードの角度の制御なども行っていますが、マルチローター機では固定したブレードで、複数のブレードの回転数によって方向の制御を行っています。したがって、フライトコントコントローラーが必須になります。
万一、ローターの一つ、または複数が不調になった場合でも飛行を維持することができるのは、ロータの数がより多くあるためでもあります。しかし、ローターを増やすことによる、重量の増加、コストの増加とのトレードオフの関係にあります。また、ペイロードを増やすために、ローターを増やすという選択をされる機体もあるようです。マルチコプターはヘリコプターの様にテールロータがないため、隣り合うローターの回転方向を、逆方向にすることによって、アンチトルクを得て、機体の回転バランスを保っています。
1) 上昇、ホバリング、降下
機体に備わる全てのローターを回転させ回転数を増加させていくと、機体重量以上の揚力を得ると上昇し始める。機体重量と揚力が釣り合い、高度が安定した状態を継続するとホバリングとなる。
ホバリング状態からローター回転数を下げると降下する。
2) 前後、左右移動
機体の前後左右移動は、その指示した側のローターの回転数を下げ、反対側のローター回転数を上げることで機体が傾き、ローター推力の合力が、指示した方向に傾くので、傾いた方向に機体が移動する。
3) 水平回転ローターの反トルクバランスを崩すと機体の水平回転が始まる。
揚力を得ている状態で、右もしくは左回転を指示すると、指示した回転方向のローターの回転数が下がりトルクバランスが崩れ回転が始まる。
4) 回転翼航空機(マルチローター)と機体の動き
回転翼航空機(マルチローター)を操縦する際に、機体の動きを指示するために用いられる用語として以下のものがある。
回転翼航空機(マルチローター)を操縦する際に、機体の動きを指示するために用いられる用語として以下のものがある。
● スロットル:上昇・降下
● ラダー:機首方向の旋回
● エルロン:左右移動
● エレベーター:前後移動
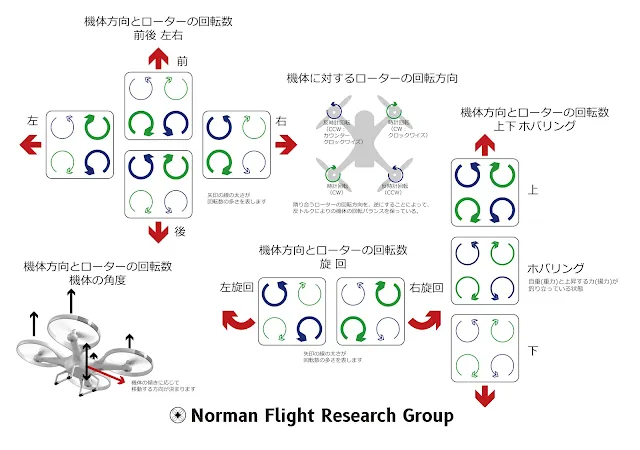

- ホバリング…揚力と重力が等しくなる
- 上昇…4つのモーターの回転数が高くなる
- 下降…4つのモーターの回転数が低くなる
- 前後左右移動…進行方向とは反対の2枚のプロペラの回転数が高くなる。
機体が一定の傾きになり、進行方向へ移動する。 - 左旋回…右回転のプロペラの回転数が相対的に高くなる
- 右旋回…左回転のプロペラの回転数が相対的に高くなる
モーターと力の関係
モーターの出力を上げる(回転数を上げる)ことで、ローターによる押し出す力が大きくなります。モーターの出力と、その結果、起こるドローンの動作(推進力、回転)の関係を見てみます。
4つのモーターがある同じ回転数で回転しているときに、その力の合計(揚力)がドローンの総重量(重力)と釣り合っている場合、ドローンはその場で制止(ホバリング)します。
4つのモーターより生じる推進力とドローンにかかる重力の影響が釣り合うためです。
ここで、4つのモーターの回転数を同時にすべて上げることで、推進力(この場合、揚力)が大きくなり、ドローンは上昇します。注意すべき点は、推進力を制御する際にドローンの機体の姿勢や、回転には影響を及ぼさないという点です。水平の機体姿勢を保ったまま垂直に上昇するという事です。これは、モーターの出力をコントロールすることで推進力を独立させて制御することが可能だという事を示しています。このことは、他の回転軸であるヨー軸、ロール軸、ピッチ軸についても、同じことが言えます。
ヨー軸の回転
図にもあるように、時計回りのモーターの出力を上げ、反時計回りのモーターの出力を下げることでヨー軸の回転(機体の旋回)が実現します。2つのモーターの出力を上げた分だけ、2つのモーターの出力を下げるようフライトコントローラーで制御されているため、全体の力の総量は同じになります。よって、ドローンの推進力は変わりません。
また、他の回転方向(ロール軸とピッチ軸)についても、隣り合ったモーターの出力の合計は変化しないため、傾きが発生せずロール軸方向やピッチ軸方向の回転は起こりません。
機体を水平に保ったまま、その場でぐるりと旋回できるのはこのためです。
機体を水平に保ったまま、その場でぐるりと旋回できるのはこのためです。
ロール軸の回転
図のように右側2つのモーターの出力を上げ、左側2つの出力を下げることで、ドローン本体の姿勢にはロール軸の回転が発生します。これは、左右での力のバランスが均等でなくなるためです。この場合、機体は左側に傾き、左方向に進むことになります。先ほど述べたように、左右でのバランスは無くなったのですが、前後方向や上下方向のバランスは保たれています。前後方向についてはそれぞれ出力を上げたモーターと下げたモーターが、対になっているため、得られる推進力は、均等になっているためです。
また、時計回りのモーターのペアと反時計回りのモーターのペアについても同様に、出力を上げたモーターと下げたモーターが対になっているため、均等が保たれています。
よって、ロール軸の回転を制御する際に、他の回転(ピッチ軸、ヨー軸)には影響を及ぼさないということになり、ロール軸の回転を独立して制御することが出来ます。
ピッチ軸の回転
ピッチ軸(前後方向)の回転についても、ロール軸の回転と同様のことが言えます。
後側2つのモーターの出力を上げ、前側2つの出力を下げることで、ドローン本体の姿勢にはピッチ軸の回転が生じます。この場合、機体は前に傾き、前進することになります。
(2) 大型機(最大離陸重量 25kg 以上)の特徴
回転翼航空機(マルチローター)の最大離陸重量 25kg 以上の大型機の特徴としては、以下のものが挙げられる。
● 機体の対角寸法やローターのサイズやモーターパワーも大きくなり、飛行時の慣性力も増加し、上昇・降下や加減速などに要する時間と距離が長くなる。
● 離着陸やホバリング時の地面効果等の範囲が広がり、高度な操縦技術を要する。
● 飛行時機体から発せられる騒音も大きくなり周囲への影響範囲も広がる。
地面効果とは
地面効果とは
地面効果[ground effect]とは、翼形状を持つ物体が地面(水面のような均一の平面)付近を移動する際、翼と地面の間の空気流の変化に影響を受ける現象で、航空機が地表(水面近く)飛行する場合、翼が受ける揚力が大きくなる現象を言います。ドローンに限って表現するなら、「下ろそうとすると浮く」や、「降ろしにくい」と感じる現象です。この、地面効果(水面効果)を利用した、地面効果翼機と言われる、エコな輸送船(航空機)の研究・開発 がアメリカなど一部の国では、なされているようです。
がアメリカなど一部の国では、なされているようです。
←3.2 航空法以外の法令等
←3.2 航空法以外の法令等