5.2 操縦者に求められる操縦知識【教則学習】
2023年1月15日
2025年2月28日
5. 無人航空機の操縦者及び運航体制 5.2 操縦者に求められる操縦知識

無⼈航空機操縦士の学科試験の受験の為の学習資料としてのご利用は下記の最新版「第3版」をご覧ください。
5.2 操縦者に求められる操縦知識【教則学習(第3版)】
「無人航空機の飛行の安全に関する教則」(第3版) 令和5年(2023年)4月13日【教則学習】目次
教則の本文を黒色に、独自に追記した補足説明や注釈を別色で記載しています。
5.2.1 離着陸時の操作
(1) 離着陸時に特に注意すべき事項(回転翼航空機(マルチローター))
1) 離陸
回転翼航空機(マルチローター)はコントローラー等によるスロットル操作によって高速に回転する翼から発せられる揚力が重力を上回ることにより離陸する。
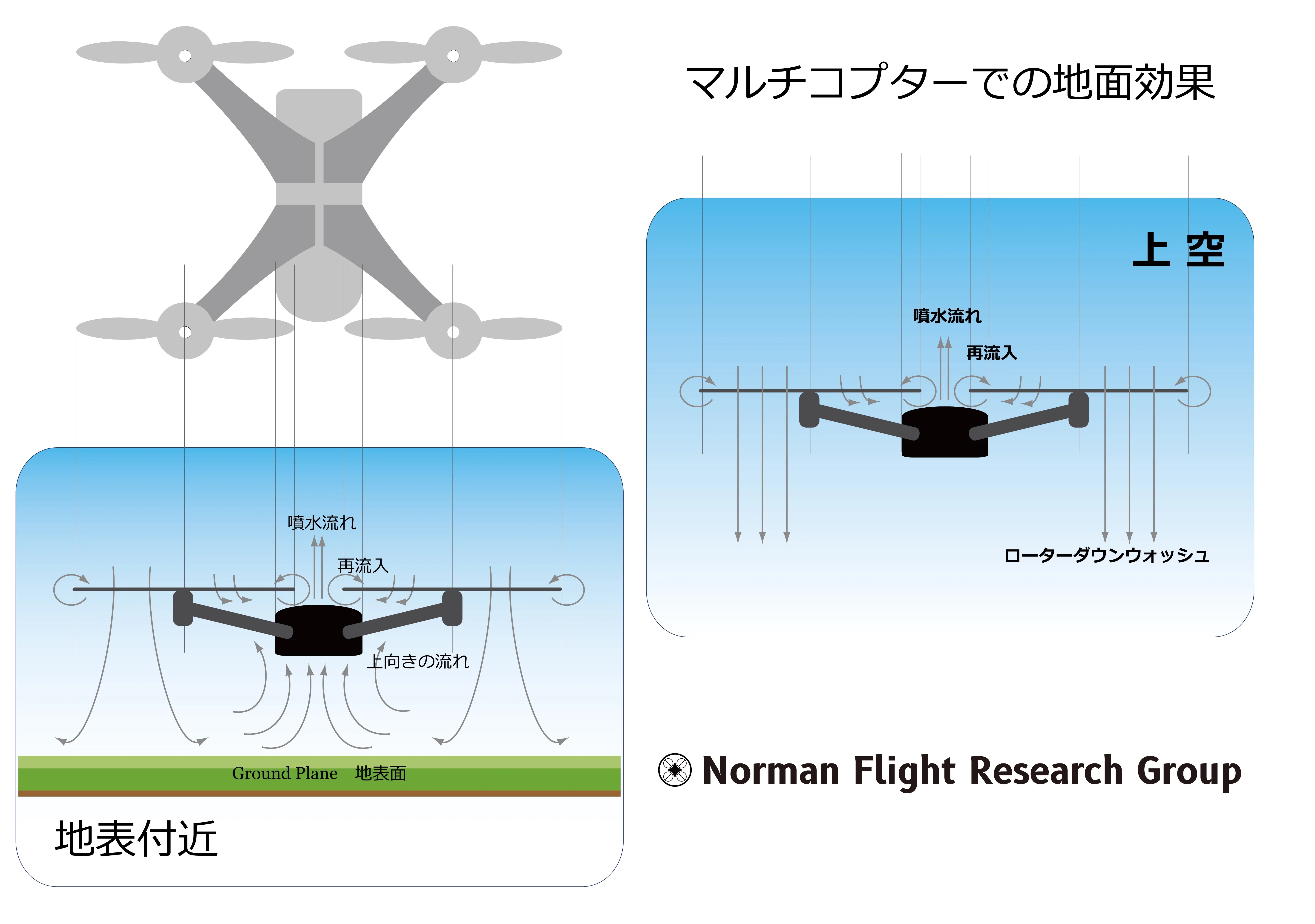
機体重量 1.5kg ほどの回転翼航空機(マルチローター)を例にすると、離陸直後から対地高度1m程度までの間は、回転翼から発せられる吹きおろしの気流が地面付近で滞留し、揚力が増す現象「地面効果」が起こりやすくなる。
2) ホバリング
離陸後、任意の対地高度で一定の高度と位置を継続的に維持することをホバリングという。
ホバリング状態の機体は回転翼から発せられる揚力と、重力のバランスが保たれている状態を維持している。
回転翼航空機(マルチローター)が飛行時に高い安定性を確保するために方位センサ、地磁気センサや GNSS 受信機、気圧センサが用いられている。
緊急時にはセンサ類に頼らない手動操作によるホバリングも要求される。
3) 降下
機体を降下させるには、スロットル操作を徐々に弱め揚力を減少させる。
機体を垂直降下させる時に、吹きおろした空気が再び吸い込まれ、回転翼の上下で空気の再循環が発生し急激に揚力を失う現象「ボルテックス・リング・ステート」が発生する。降下の際は水平方向の移動を合わせて操作することで墜落防止対策となる。
4) 着陸
降下を継続し着陸を行う際には、対地高度に応じて降下速度を減少させる。着地後にコントローラーでローターの回転を停止させる。
5) GNSS を使用しない操作
緊急時には GNSS 受信装置による機体位置推定機能を使用しない機体操作が求められる。
6) GNSS を使用しないホバリング
ホバリング中 GNSS 受信機能を無効にすると、機体周辺の気流の影響で水平位置が不安定となるためエレベーター操作及びエルロン操作により水平位置を安定させホバリング飛行を維持させる。
7) GNSS を使用しない着陸
上述の操作によりホバリングを安定させながら、スロットル操作により機体を降下させ着陸させる。
機体を垂直降下させる時に発生する「ボルテックス・リング・ステート」や、「地面効果」を抑制するために、細かくエレベーター又はエルロン操作などを行いながら、機体を着地させ着陸を完了させる。
地面効果 [ground effect]
地面の近接によって引き起こされる航空機の空力反応の変化を起こす現象をいいます。 航空機、ヘリコプター、その他の飛行機械が地面に非常に接近して飛行する場合(地面効果翼機など)、揚力が増加します。この揚力は、 ダウンウォッシュのたわみによる迎え角の効果的な増加によって引き起こされ、誘導抗力の増加はありません。この効果は、航空機が地上から翼幅の約半分またはローターディスクの直径の4分の3より高くなると、地面効果は急速に減少します。 地面の効果に影響を与える他の要因は、地面の性質や、その傾斜などで地面近くで動作する回転翼航空機の場合、誘導抗力が減少し、流入速度が低下するため、揚力ベクトルがより垂直になります。渦輪は小さくなり、より少ない出力でホバリングを維持することができます。
地面効果 [ground effect]
地面の近接によって引き起こされる航空機の空力反応の変化を起こす現象をいいます。 航空機、ヘリコプター、その他の飛行機械が地面に非常に接近して飛行する場合(地面効果翼機など)、揚力が増加します。この揚力は、 ダウンウォッシュのたわみによる迎え角の効果的な増加によって引き起こされ、誘導抗力の増加はありません。この効果は、航空機が地上から翼幅の約半分またはローターディスクの直径の4分の3より高くなると、地面効果は急速に減少します。 地面の効果に影響を与える他の要因は、地面の性質や、その傾斜などで地面近くで動作する回転翼航空機の場合、誘導抗力が減少し、流入速度が低下するため、揚力ベクトルがより垂直になります。渦輪は小さくなり、より少ない出力でホバリングを維持することができます。
ボルテックス・リング・ステート [vortex ring state]
セットリング・ウィズ・パワー [settling with power]と呼ばれる場合もあります。
ボルテックス・リングに留まってしまう(はまり込む)状態の事で、飛行中にボルテックス・リング・ステート(渦輪状態)がローターを飲み込み、揚力の深刻な損失を引き起こす事を言います。この状態では、ローターは周囲の流れ場に飲み込まれ、それ自体のダウンウォッシュによって誘発され、突然揚力を失います。揚力を増すためにローターの出力を上げ揚力を得ようとすればするほど、ボルテックス(渦)の動きを増大させるだけで、揚力を増やすことが出来なくなります。ボルテックス・リング(渦輪)は安定した流体力学現象であるため、それらから回復する最良の方法は、揚力を再確立するために横方向に回避し、ボルテックス・リングから抜け出してから、乱気流をおこすためにローターの出力を上げてボルテックス・リングを分解することです。

(2) 離着陸時に特に注意すべき事項(回転翼航空機(ヘリコプター))
1) 離着陸地点の選定
● 水平な場所を選定すること。離着陸直前は、機体が水平となるため、傾斜地ではテール部などが地面に接触する恐れがある。
● 滑りやすい場所を避けること。離陸前は、ヨー軸まわりの制御が不十分な場合があり、ヨー軸を中心に回転する恐れがある。
● 砂又は乾燥した土の上は避けること。ローターのダウンウォッシュによる砂埃等が飛散し、視界を遮るおそれがある。
2) 離陸方法
● 十分にローター回転が上昇してから、離陸すること。ローター回転が低い状態で無理に離陸させると、機体の反応が遅れることがあり、危険である。
● テールローターの作用で、離陸時に機体が左右いずれかに傾く場合がある。傾く方向はローターの回転方向により異なる。予め傾く方向を確認した上で、離陸させること。
● ローター半径以下の高度では、地面効果の影響が顕著となり、機体が不安定になる。離陸後は速やかに地面効果外まで機体を上昇させること。
● やむを得ない場合を除き、垂直方向の急上昇は避けること。ローター回転が低下し、機体が不安定になるおそれがある。
3) 着陸方法
● 地面に近づくにつれ、降下速度を遅くし、着陸による衝撃を抑えること。衝撃が大きい場合、脚部が変形又は破損するおそれがある。
● 地面効果範囲内のホバリングは避け、速やかに着陸させること。
● 接地後、ローターが停止するまで、機体に近づかないこと。
水平な場所を選定すること。
周囲に障害物がなくても、傾斜した場所へ離着陸は危険です

ダウンウォッシュ
揚力を得るために下方へ作り出される風のことをいいます。
(3) 離着陸時に特に注意すべき事項(飛行機)
1) 離着陸地点の選定
● 滑走路は水平で草などが伸びていない場所を選定すること。傾斜地では滑走中に不安定になり、また草などが伸びているとプロペラに接触し飛行ができないおそれがある。
● 飛行機の離着陸は風向が重要である。離着陸の方向は向かい風を選ぶのが原則である。横風であってもできる限り向かい風方向を選択する。追い風で行うと失速の危険性が生じ、失速しない速度にすると滑走路を逸脱する危険が生じる。
2) 離陸方法
● 向かい風方向に滑走できるエリアを確保できたら離陸操縦に入る。
● 風速を考慮し適切なパワーをかけてエレベーターによる上昇角度をとり離陸する。
● 上昇角度は失速しないように設定する。安全な高度まで機体を上昇させる。
3) 着陸方法
● 向かい風方向に滑走できるエリアを確保できたら着陸操縦に入る。
● 地面に近づくにつれ、降下速度を遅くし、滑空着陸による衝撃を抑えること。衝撃が大きい場合、脚部が変形又は破損するおそれがある。
● 目測の誤りにより滑走路を逸脱することがあるので、厳重に注意が必要である。
フライト中に鳥からの攻撃を受けるケースが実際にあると思います。特に、小型の無人航空機の場合、鳥の方から向かってくる可能性が高いです。また、攻撃された場合、小型の機体であればあるほど、機体の安定を保てず、墜落してしまう場合もありますので周囲の鳥などの動物の動きにも注意が必要です。
(4) カテゴリーⅢ飛行において追加で必要となる離着陸の注意点〔一等〕
カテゴリーⅢ飛行において、離着陸時では以下に注意して行わなければならない。
● 離着陸に際しては、機体と人が接触するなど第三者の安全が損なわれるおそれがないようにする。
● 離着陸時ローターから発せられる風の影響を受け、物などが飛ばされないようにする。
● 近接する壁面や構造物により、離着陸時に機体が不安定になるような環境は離着陸エリアから除外する。
● 離着陸エリア上空周辺に電線などの障害物がない、又は回避できる空域を選ぶ。
5.2.2 手動操縦及び自動操縦
(1) 手動操縦・自動操縦の特徴とメリット
1) 無人航空機の操縦方法(自動操縦と手動操縦)
無人航空機は優れた安定性と高い飛行性能から、人による手動操縦だけでなく、アプリケーションなどにより事前に設定した飛行経路を正確に飛行することが可能となっている。
飛行自体は自動で飛行し、機体に付属している撮影用カメラなどのみ人が操作するような複合的な操縦も行える。
空中写真測量などによる飛行では測地エリアを指定するのみで自動的に飛行経路や撮影地点をプランニングする機能も備えられている。
手動操縦は送信機のスティックにより機体の移動を命令して行う。操縦者の操縦技量によって飛行に安定性に差が生じるが、操縦技量が向上すると自動操縦では実現できない複雑で変化に対応した機体の操作が行える。
2) 手動操縦の特徴とメリット
無人航空機の安定飛行に必要な GNSS 受信機やセンサを用いた機体を、コントローラースティックで意図した方向に飛行させるが、その制御は全て人が行う。
操縦者の習熟度によって飛行高度の微調整や回転半径や航行速度の調整、遠隔地での高精度な着陸など細かな操作が行え、複雑な構造物の点検作業や耕作地の農薬散布、映画のような芸術性を要求される空撮などでは手動操縦による制御が求められる。
安定した飛行に使われている GNSS 受信機や電子コンパス、気圧センサなどが何らかの原因により機能不全に陥ったときには手動操縦による危険回避が求められる。
定められた航路を高精度に飛行をするなど、高い再現性を求められる操縦には不向きである。
3) 自動操縦の特徴とメリット
飛行を制御するアプリケーションソフトに搭載されている地図情報に、予め複数の飛行時のウエイポイント(経過点)を設定し飛行経路を作成する。
ウェイポイントは地図上の位置情報の設定だけでなく、機体の向きや高度、速度など詳細な設定が可能である。
手動操縦に比較して、再現性の高い飛行を行うことができるため、経過観察が必要とされる用地や、離島への輸送、生育状況を把握する耕作地などの飛行に利用される。
(2) 自動操縦におけるヒューマンエラーの傾向
ウェイポイント設定時、飛行経路上の障害物等の確認不足によって衝突や墜落が発生することが想定できる。設定した飛行経路上の障害物等は事前に現地確認を行うこと。
(3) 手動操縦におけるヒューマンエラーの傾向
手動操縦は無人航空機を精細に制御できる反面、操縦経験の浅い操縦士が操作を行うと様々な要因で意図しない方向に飛行してしまう場合がある。
これは操縦者の視線と回転翼航空機の正面方向が異なる場合に発生しやすい。さらに機体と操縦者との距離が離れると機体付近の障害物などとの距離差が掴みにくくなり接触しやすい状況となる。
これらのリスク回避には、機体をあらゆる方向に向けても確実に意図した方向や高度に制御できる訓練や、指定された距離での着陸訓練などが有効となる。
ヒューマンエラー
人間が犯す誤りや失敗の事を言います。機械やシステムの事故の原因が、人間のミスに起因する場合のことで、人的エラーや人的過誤と言われる場合もあります。
JISの Z 8115で規定される、ディペンダビリティ(総合信頼性)用語では「人間が実施する又は省略する行為と、意図される又は要求される行為との相違。」と定義されています。
ヒューマンエラー
人間が犯す誤りや失敗の事を言います。機械やシステムの事故の原因が、人間のミスに起因する場合のことで、人的エラーや人的過誤と言われる場合もあります。
JISの Z 8115で規定される、ディペンダビリティ(総合信頼性)用語では「人間が実施する又は省略する行為と、意図される又は要求される行為との相違。」と定義されています。
(4) 自動操縦と手動操縦の切り替えにおける操作上の注意と対応
自動操縦中、下記のような状況下で手動操作に切り替える場合がある。
● 作業指示による手動操作
● 何らかの原因で不安定な飛行と判断した場合
手動操縦に切り替えた後は、急な航行速度の低下や失速に備えた操作準備や、障害物への接近を避けるための機体方向の確認、ホバリングしての機体の安定性や周囲の安全の確認などが必要となる。
(5) カテゴリーⅢ飛行において追加となる自動操縦の注意点〔一等〕
カテゴリーⅢ飛行の自動操縦時では、飛行経路及び周辺に送電線や構造物が障害とならない飛行範囲や経路を事前に確認し設定する。また、鳥などの野生動物からの妨害を想定し防御や手動操縦での切り替えを速やかに行える体制を整えておく必要がある。
フライト中に鳥からの攻撃を受けるケースが実際にあると思います。特に、小型の無人航空機の場合、鳥の方から向かってくる可能性が高いです。また、攻撃された場合、小型の機体であればあるほど、機体の安定を保てず、墜落してしまう場合もありますので周囲の鳥などの動物の動きにも注意が必要です。
5.2.3 緊急時の対応
緊急時には、離陸地点などに戻すことを前提とせず、速やかに近くの安全な無人地帯へ不時着させる。
(1) 機体のフェールセーフ機能
送信電波や電源容量の現象などにより飛行が継続できない場合、又は継続できないことが予想される場合は、予め飛行制御アプリケーションのフェールセーフ機能により、自動帰還モードへ切り替わり、離陸地点へ飛行する。さらにバッテリー残量が極端に少ない場合などはその場で自動着陸を試みる。
フェールセーフ機能発動時、機体の動作をホバリング、その地点での着陸、自動帰還などの設定を行うことができる機体もある。
フェールセーフ機能発動中にバッテリー残量不足等の飛行が継続できない場合、又は予想される場合、機体は着陸動作に遷移し着陸を試みる。
フェールセーフ
JISの Z 8115で規定される、ディペンダビリティ(総合信頼性)用語では「故障時に、安全を保つことができるシステムの性質」と定義されています。
トラブルが発生した場合、または、発生する可能性が高い場合などに、安全を保つように自動的に働く機能の事です。
無人航空機の機体の場合、コントロールを電波で行っている場合が多いと思いますが、機体がこの電波を受信できなくなった場合や、バッテリーの残量が少なくなった場合など、ある一定の条件で、安全を保つように、フェールセーフ機能が備わっている場合があります。
どのような条件で、フェールセーフ機能が発動し、どのような動作を自動的にするのかを、あらかじめ知っておくことは大変重要な事だと思います。
機体のバッテリーの残量を少ないと判断した機体が自動で飛行の離陸地点へ戻ってくるとします。この時、どのようなルートを通って帰ってこようとするか、全くわからなければ事故につながる可能性があります。飛行高度など事前に障害物をできる限り避けるような高度で飛行して戻ってくれた方が良いはずです。しかし、バッテリーの残がそこまで持つのでしょうか。このような場合、最短で帰ってきてくれた方が良いともいえます。このように、機体はいい塩梅を自動で判断してくれません。そこで、フェールセーフ機能の動作を事前に確認、設定して、いい塩梅をセットしておくことが必要です。
フェールセーフ
JISの Z 8115で規定される、ディペンダビリティ(総合信頼性)用語では「故障時に、安全を保つことができるシステムの性質」と定義されています。
トラブルが発生した場合、または、発生する可能性が高い場合などに、安全を保つように自動的に働く機能の事です。
無人航空機の機体の場合、コントロールを電波で行っている場合が多いと思いますが、機体がこの電波を受信できなくなった場合や、バッテリーの残量が少なくなった場合など、ある一定の条件で、安全を保つように、フェールセーフ機能が備わっている場合があります。
どのような条件で、フェールセーフ機能が発動し、どのような動作を自動的にするのかを、あらかじめ知っておくことは大変重要な事だと思います。
機体のバッテリーの残量を少ないと判断した機体が自動で飛行の離陸地点へ戻ってくるとします。この時、どのようなルートを通って帰ってこようとするか、全くわからなければ事故につながる可能性があります。飛行高度など事前に障害物をできる限り避けるような高度で飛行して戻ってくれた方が良いはずです。しかし、バッテリーの残がそこまで持つのでしょうか。このような場合、最短で帰ってきてくれた方が良いともいえます。このように、機体はいい塩梅を自動で判断してくれません。そこで、フェールセーフ機能の動作を事前に確認、設定して、いい塩梅をセットしておくことが必要です。
(2) 事故発生時の運航者の行動について
運航者は、事故発生時においては、直ちに無人航空機の飛行を中止するとともに、負傷者がいる場合には、第一にその負傷者の救護及び緊急通報、事故等の状況に応じた警察への通報、火災が発生している場合の消防への通報など、危険を防止するための必要な措置を講じ、次に当該事故が発生した日時及び場所等の必要事項を国土交通大臣に報告しなければならない。
(3) カテゴリーⅢ飛行において追加となる緊急時対応手順〔一等〕
第三者上空飛行中に何らかの原因で緊急時の対応が求められた時に備えて、予め対応手順を決め速やかに緊急対応作業が行えるよう継続した訓練が求められる。
● GNSS による位置の安定機能を用いない飛行訓練
● 機体寸法に応じた緊急着陸地点の確保
● フェールセーフ機能が動作しない飛行距離等の把握
● 墜落時の安全優先順位の明確化
● 機体が発火した際の消火方法