
ドローン(Drone)無人航空機の なりたち
2024年1月17日
2024年1月17日
20世紀初頭からあった遠隔操縦航空機のアイデアと技術
様々な兵器を遠隔操作したいという発想はかなり昔からあったようですが、技術的な問題、コスト的な問題で実現していませんでした。しかし、技術の発展と共に、技術とコストとニーズがマッチした分野から徐々に進化していきました。どこまでを無人航空機とするかによって変わってきますが、広い意味で人が搭乗せず、空を飛行させるというものでいうなら、偵察用無人航空機だけでなく無人標的機や、巡航ミサイル(cruise missile)や自爆突入型ドローンなど、様々なタイプが様々なルーツから進化したということが出来るでしょう。
「ドローン」名前の由来
1940年代にアメリカで開発されたRadioplane社の無人機で、「ターゲット・ドローン」と命名されたことが発祥とされています。「ドローン」の名前の由来については、主に以下の2つの説が有力とされています。
- 雄蜂の羽音説:ドローンが飛行する際に発する「ブーン」という音が、雄蜂(英語でドローン"Drone")の羽音に似ていることから、この名前が付けられたという説。
- 射撃訓練用標的飛行機 クイーン・ビー説:第二次世界大戦中にイギリスで使用されていた標的無人機の名前が「クイーン・ビー(女王蜂)」と呼ばれていたことに敬意を表し、アメリカではオス蜂を意味するドローンを採用したと言われています。
なお、「ドローン」は一般的に「UAV(Unmanned Aerial Vehicle:無人航空機)」の一種とされていますが、すべての無人航空機がドローンとは限りません。ドローンの特徴は自律飛行できることであり、操作をする人がバランスをとらなくても、空中で正しい姿勢を維持できます。この意味では、「ドローン=自律性のあるUAV」と考えると分かりやすいでしょう。ちなみに、ドローンには水中用、水上用などもありますが、これらは「航空機」ではないため当然「UAV」には該当しません。
このような「ドローン」は、現在の戦場で大きな存在となっています。その有用性は否定できません。しかし、ハイテクで時代の最先端のようなイメージのドローンですが、約100年前の航空機の黎明期、さらにそれ以前からの長い歴史を背景に発展してきたものであることを忘れてはいけません。ドローンの技術には長年の試行錯誤の歴史があり、先人の英知と努力に支えられてi今がいます。歴史を知ることで、ドローンを客観的に理解することが出来ると思います。
このような「ドローン」は、現在の戦場で大きな存在となっています。その有用性は否定できません。しかし、ハイテクで時代の最先端のようなイメージのドローンですが、約100年前の航空機の黎明期、さらにそれ以前からの長い歴史を背景に発展してきたものであることを忘れてはいけません。ドローンの技術には長年の試行錯誤の歴史があり、先人の英知と努力に支えられてi今がいます。歴史を知ることで、ドローンを客観的に理解することが出来ると思います。
無人で飛行する爆弾 巡航ミサイルの先駆け
1849年、オーストリアの軍隊は、ヴェネツィア共和国を攻撃するために、爆弾を搭載した無人気球を使用しました。当時のウィーンの新聞は、気球によるヴェネツィア爆撃が差し迫っていると報じています。直径23フィートの気球5個が爆弾を搭載してトレヴィーゾで製造され、良い風が吹いた時にヴェネツィア上空に送り込まれる計画で、気球が垂直に降下を始めると、電磁石によって爆弾の発火装置が作動し、爆弾は垂直に落下して地上で爆発する、と新聞は伝えていました。これが、史上初の無人航空機による爆撃計画だったと言われています。この最初の爆撃計画は完全な失敗に終わりました。タイム誌によると、気球は約4500フィートまで上昇しましたが、空中で爆発したり水に落下したり、突如吹いた南東の風に流されてヴェネツィアの上を通過し、包囲していたオーストリア軍の上に落下し、作戦は失敗したと伝えています。
効率性を除けば、この試みは現在の無人航空機のコンセプトとほとんど変わらないことが分かります。
ドローンの母とされる「クイーン ビー ラジコン 標的機」

デ・ハビランド D.H. 82B クイーン ビー ラジコン ターゲット飛行機の接写
Close up of De Havilland D.H. 82B Queen Bee radio controlled target aeroplane.
This item is in the Public Domain
https://www.awm.gov.au/collection/C41028
無線遠隔操縦技術(ラジオコントロール・ラジコン)の実用化と無人航空機の先駆け
無人標的機への進化1898年にはすでに、テスラコイルなどで有名なニコラ・テスラによって無線遠隔操縦技術が実証 (船舶模型) デモンストレーションされました。これらについての特許も取得されています。
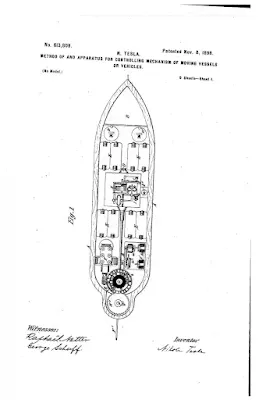
ニコラ・テスラの特許
「船舶又は車両の移動機構の制御方法及び装置」
この特許 特許第613809「船舶または車両の移動機構の制御方法および装置」は、初めてのリモートコントロール(ラジオコントロール)のボートです。大型バッテリーを搭載し、ボートのプロペラ、舵、ランニングライトを無線信号でスイッチ操作で制御できる仕組みでした。

ニコラ・テスラの特許
「船舶又は車両の移動機構の制御方法及び装置」
この特許 特許第613809「船舶または車両の移動機構の制御方法および装置」は、初めてのリモートコントロール(ラジオコントロール)のボートです。大型バッテリーを搭載し、ボートのプロペラ、舵、ランニングライトを無線信号でスイッチ操作で制御できる仕組みでした。
この技術はしばらく使われていませんでしたが、1924年にアメリカ海軍研究所がCurtiss(カーチス) F-5L 改造機により、世界で初めての完全な無線遠隔操縦による離着陸(水上機なので離着水)を含む飛行に成功しています。
20世紀に動力飛行機が実用化されると、再び無人機の概念が試みられるようになりました。第1次世界大戦では、機体、訓練、戦術、対空システムが急速に発展しました。とくに、魚雷投下のような攻撃任務では、パイロットは長時間標的に照準を合わせる必要があり、大きな危険にさらされました。また、敵の制空権下を奥深く飛行して爆弾を投下する任務も、パイロットにとっては非常に危険なものでした。こうした状況下で、人命の危険を避けるために無人航空機の活用が再検討されるようになって行きました。
スペリー空中魚雷のテストは、アメリカで初めての誘導ミサイルの計画でした。Sperryが船舶用に開発したジャイロスコープの技術を使って、飛行機のピッチ・ロール・ヨー、三軸の姿勢をサーボモーターで制御する自動操縦システムを作り(Hewitt-Sperry Automatic Airplane,1914年)、これをアメリカ海軍が無人航空機として軍事利用しようとしました。自動操縦装置を開発したローレンス・スペリーは1916年に新会社を立ち上げ、フロリダ州のアミティビルという場所で飛行機の開発を始めました。そこで海軍は、目標に向けて発射できる無人爆弾の開発に資金提供し、近くのカーチス社で5機の「空中魚雷」が作られました。魚雷を発射するレールと台車からなる、システムが開発され、ある程度の成功を収めました。空中魚雷にはTNT爆弾を積み、敵の目標に向けて発射されるようになっていました。発射された機体は、決められた時間が過ぎると、エンジンが止まって機体が目標に突撃して行くようなものでした。
1918年3月にはじめて成功したこの「空中魚雷」は、自動制御の大型無人航空機として世界初のもので、現在の巡航ミサイルの先祖にあたります。しかし、当時のジャイロスコープによる誘導は精度が足りず、第1次世界大戦終結後はこのような飛行爆弾の実験はすべて中止され、実用化には至りませんでした。
同じ時期、アメリカ陸軍も無人航空機の実用化を目指して「Kettering Bug」を開発していました。Sperry機と同様、ジャイロスコープと気圧高度計を使った安定化システムを持っていました。終戦直前に量産計画もありましたが、システムの信頼性が低いことが分かり、実用化されませんでした。1942年には、アメリカ海軍は搭載カメラの映像を使って遠隔操作が可能なTDR-1を開発し、飛行試験を行いました。当時実用化したばかりの映像送信装置とレーダー高度計を搭載し、随伴機からの遠隔操作をすることができるものでした。

Unknown authorUnknown author, Public domain, via Wikimedia Commons
最初期の無人動力飛行機の一つで、もっとも有名なのがケタリング・バグです。これは小型の複葉機で、設定した方向に最大120km飛行することができました。
大きな可能性を秘めていましたが、新技術が次々に登場した第一次世界大戦の激しい変化の中では、十分なインパクトを与えるには力不足でした。ケタリング・バグは、危険なリン化水素ガスと高性能爆薬の混合物を運搬する目的で設計されましたが、多くの技術的な欠陥があり、これらのシステムがある程度成功を収めた頃には、戦争はすでに終わっており、量産には移行できませんでした。
ケタリング バグは実験用の無人航空魚雷であり、現在の巡航ミサイルの先駆けです。 時速 50 マイル (80 km/h) の速度で移動しながら、発射点から最大 75 マイル (121 km) 離れた地上目標を攻撃することができました。 バグの高価な設計と運用に触発されて、ヘンリー・W・ウォールデン博士は、パイロットが打ち上げ後に電波を使ってロケットを制御できるロケットの開発を思いつきました。これが巡航ミサイルということです。
大きな可能性を秘めていましたが、新技術が次々に登場した第一次世界大戦の激しい変化の中では、十分なインパクトを与えるには力不足でした。ケタリング・バグは、危険なリン化水素ガスと高性能爆薬の混合物を運搬する目的で設計されましたが、多くの技術的な欠陥があり、これらのシステムがある程度成功を収めた頃には、戦争はすでに終わっており、量産には移行できませんでした。
ケタリング バグは実験用の無人航空魚雷であり、現在の巡航ミサイルの先駆けです。 時速 50 マイル (80 km/h) の速度で移動しながら、発射点から最大 75 マイル (121 km) 離れた地上目標を攻撃することができました。 バグの高価な設計と運用に触発されて、ヘンリー・W・ウォールデン博士は、パイロットが打ち上げ後に電波を使ってロケットを制御できるロケットの開発を思いつきました。これが巡航ミサイルということです。
第一次世界大戦中、アメリカ陸軍航空機委員会はオハイオ州デイトンのチャールズ・ケタリングに、40マイル(64キロ)の範囲の目標を攻撃できる無人「飛行機械」の設計を依頼した。 ケタリングの設計は、正式にはケタリング航空魚雷と呼ばれていましたが、後にケタリング バグとして知られ、デイトン ライト飛行機会社によって製造されました。 オーヴィル・ライトはこのプロジェクトの航空コンサルタントを務め、エルマー・アンブローズ・スペリーは制御および誘導システムを設計しました。 操縦可能な開発航空機はデイトン・ライト・バグとして製造されました。
この航空機は 2 ストローク V4 40 馬力 (30 kW) デパルマ エンジンを搭載していました 。 このエンジンはフォード モーター カンパニーによって 1 基あたり約 40 ドルで量産されました。 胴体は木の積層板と張り子で作られ、翼はボール紙で作られていました。 「バグ」は時速50マイル(時速80キロ)の速度で飛ぶことができた。 各バグの総コストは 400 ドルでした。
バグは、ライト兄弟が 1903 年に初めて動力飛行を行ったときに使用した方法と同様の、台車と軌道システムを使用して打ち上げられました。打ち上げられると、搭載された小型のジャイロスコープが航空機を目的地まで誘導しました。 制御システムには、空気圧/真空システム、電気システム、およびアネロイド気圧計/高度計が使用されました。
バグが目標を確実に命中させるために、航空機の飛行距離を追跡する機械システムが考案されました。 離陸前に、技術者は飛行経路に沿った風速と方向を考慮して、対空飛行距離を決定しました。 これは、バグが目的地に到達するために必要なエンジンの総回転数を計算するために使用されました。 総回転数カウンターがこの値に達すると、カムが下がり、エンジンが停止し、翼を取り付けているボルトが後退し、翼が外れました。 バグはターゲットに向かって弾道を描き始めました。 この衝撃により、積載重量 82 kg の爆発物が爆発しました。

Winston Churchill and the Secretary of State for War waiting to see the launch of a de Havilland Queen Bee radio-controlled target drone, 6 June 1941.
1941年6月6日、デ・ハビランド・クイーンビーのラジコン標的無人機の発射を待つインストン・チャーチル首相と陸軍国務長官。
War Office official photographer, Horton (Capt), Public domain,
via Wikimedia Commons一方、1933年にイギリス海軍は、「Fairy Bee」と呼ばれる水上機を無線操縦で飛行させることに成功し、その後、女王蜂 クイーン・ビー(Queen Bee)と呼ばれる対空射撃訓練用の無人航空機を開発しました。イギリス空軍の練習機デ・ハビランド タイガーモス(de Havilland DH82B Tiger Moth)に無線誘導装置を搭載したもので、1935年から約380機が製造されて1947年まで空軍と海軍で使用されました。機体は合板張りの胴体と布張り複葉機の主翼で、全長7.3m、翼幅8.9mで、基となったタイガーモスとほとんど変わらない外見でした。複座のコックピットはそのままで、前席にパイロットが乗って有人飛行もできました。密閉された後部コックピットの位置には、航空機の舵とエレベーターの制御装置にリンクされた空気圧操作のサーボユニットを含む RAE 無線制御装置が装備されていました。サーボユニットを通じて機体を制御していました。サーボユニットの動力は圧縮空気で、胴体左舷側のプロペラ後流にある 4 枚羽根の木製風車がエア ポンプを駆動し、ジャイロ ユニットとサーボに圧縮空気を供給しました。最大速度は時速170km程度で、無線操縦で高度5000mまで上昇できる能力がありました。海軍で使用した機体には、艦隊航空部隊のためにフロートを取り付けられていました。
その後も、実際の航空機に無線遠隔制御装置を搭載して無人の標的機として使う方法が現在でも行われています。
1934年にアメリカのラジオプレーン社が無線操縦の模型飛行機を発売しました、このラジオプレーン社は後に標的機も製造するようになります。ちなみにラジオプレーン社は、第一次世界大戦のイギリス空軍パイロット出身の俳優志望のレジナルド・デニー氏がハリウッドでの俳優業を求めて設立したレジナルド・デニー・インダストリーズ社として誕生しました。デニーは仲間とハリウッドにホビーショップを開店し、これがOQ-2を販売するラジオプレーン・カンパニーになったそうです。
1935年にRP-1試作機を製作し、陸軍に売り込みました。高射砲の訓練には高高度の移動目標が必要で、遠隔操縦機を使えば地上の砲手の訓練に使用することが有用だと考えました。。1938年にウォルター社から購入したRP-2型を改良したRP-2が登場し、その後陸軍の指導でRP-3、RP-4へと発展していきました。陸軍がOQ-1として購入したのはRP-4の最終型でした。RP-5が大量に発注され、これがOQ-2として制式採用されます。この型番のアルファベットの「OQ」は「小型の無人標的」を意味しています。
1934年にアメリカのラジオプレーン社が無線操縦の模型飛行機を発売しました、このラジオプレーン社は後に標的機も製造するようになります。ちなみにラジオプレーン社は、第一次世界大戦のイギリス空軍パイロット出身の俳優志望のレジナルド・デニー氏がハリウッドでの俳優業を求めて設立したレジナルド・デニー・インダストリーズ社として誕生しました。デニーは仲間とハリウッドにホビーショップを開店し、これがOQ-2を販売するラジオプレーン・カンパニーになったそうです。
1935年にRP-1試作機を製作し、陸軍に売り込みました。高射砲の訓練には高高度の移動目標が必要で、遠隔操縦機を使えば地上の砲手の訓練に使用することが有用だと考えました。。1938年にウォルター社から購入したRP-2型を改良したRP-2が登場し、その後陸軍の指導でRP-3、RP-4へと発展していきました。陸軍がOQ-1として購入したのはRP-4の最終型でした。RP-5が大量に発注され、これがOQ-2として制式採用されます。この型番のアルファベットの「OQ」は「小型の無人標的」を意味しています。
OQ-2は、6馬力の2気筒エンジンで、2基のプロペラを駆動し、最高速度は時速85マイル、航続時間は約1時間でした。全長は約2.6m、翼幅は約3.7m、重量は約48kgでした。
発射はカタパルトのみで、訓練終了後はパラシュートで回収されます。陸軍向けのOQ-2には緩衝のための着陸装置が使われましたが、海軍向けの改良型やその後の派生型には装備されていませんでした。
第二次世界大戦直前の1939年に登場しました。この小型機は約1万5000機が製造され、主にアメリカ陸軍航空隊に納入されました。一部はアメリカ海軍にも購入されました。これがアメリカ初の量産型のドローンになります。後継バージョンの OQ-3 は、米国軍で最も広く使用されている標的無人機となり、第二次世界大戦中に 9,400 機以上が製造されました。その後も改良されOQ-14まで作られました。
第二次世界大戦後も、ラジオプレーンの標的ドローンを使った様々な実験が行われました。1950年のある実験では、OQ-3の派生型が軍用通信線の敷設に使われています。ラジオプレーン社は1952年に防衛大手ノースロップ社に買収されました。
第二次世界大戦後も、ラジオプレーンの標的ドローンを使った様々な実験が行われました。1950年のある実験では、OQ-3の派生型が軍用通信線の敷設に使われています。ラジオプレーン社は1952年に防衛大手ノースロップ社に買収されました。
1944年、アメリカ軍が開発した「BQ-7」は、B-17爆撃機を改造した最初のドローン(無人航空機)で、高性能爆弾を積んで突入攻撃する目的でしたが、技術的問題で操縦不能になることが多く、太平洋戦争で少数が実戦投入されましたが(アフロディーテ作戦)、任務遂行には一度も成功しませんでした。
ちなみに、もう一つの巡航ミサイルの先祖とされるドイツの「V1飛行爆弾」は、1944年6月に実戦投入されました。こちらは、ジャイロスコープと気圧高度計で方向と高度を制御し、ピトー管で、速度をモニタリングし、機体先端の小さなプロペラの回転数で飛翔距離を測定するシステムで、所定の回転数でエンジンが停止して急降下し目標に突入するという仕組みでした。これは、無線操縦ではないです。
標的機としてのドローン(ターゲットドローン)
ターゲットドローンは、一般に遠隔操作される無人航空機で、対空訓練に使われることが多いです。初期の例として、1935年から運用されたイギリスのタイガーモス練習機の派生型DH.82 クイーンビーがあります。この機体の名前が「ドローン」という用語の起源になりました。最も単純な形の標的ドローンは、ラジオコントロール模型飛行機に似ています。より近代的な無人機は、有人機を模倣するため対抗措置やレーダーなどのシステムを搭載することがあります。
さらに高度な無人機は、弾頭を取り外した古い大型ミサイルから作られることもあります。
イギリスでは、1950年代から1990年代にかけて、古いイギリス空軍や海軍のジェット機やプロペラ機(ランべドル空軍基地で使用)が遠隔操作の無人機に改造されていました。フェアリー ファイアフライ、グロスター メテオ、デハビランド シービクセンなどがそうです。
Firefly U.Mk 8
ファイアフライ U.Mk 8は標的ドローン機で、34機のファイアフライ T.7 訓練機が製造ライン上で標的ドローンへ転用されました。
Firefly U.Mk 9
ファイアフライ U.Mk 9は、既存のファイアフライ Mk AS.4 と AS.5 のうち40機を改造した標的ドローン機です。
de Havilland Sea Vixen D.3
シービクセンは無人機として運用され、シービクセンD.3と改名されました。D.3規格に改造されたのは4機のみでした。
予算の豊富なアメリカ軍では、退役機や旧型現役機(QF-4 ファントムIIやQF-16 ファイティングファルコンなど)を、空軍、海軍、海兵隊のフルスケールの航空標的として遠隔操作できるよう改造することが多くなっています。
標的のドローンは、単純な形でラジオコントロールの模型飛行機のような形状です。より近代的な無人機は、有人機に擬態するために、対抗手段、レーダー、同種のシステムを搭載することがあります。
より高度なドローンは、ミサイルの弾頭部分を取り外した旧式の大型ミサイルを流用して作られています。
イギリスでは、1950年代から1990年代にランベドル空軍基地で使用された、旧式のイギリス空軍や海軍のジェット機やプロペラ機(フェアリー ファイアフライ、グロスター メテオ、デハビランド シービクセンなど)を遠隔操作可能なドローンに改造していました。
例えば、ファイアフライ U.Mk 8 は34機のファイアフライ T.7を標的ドローンに改造したものです。ファイアフライ U.Mk 9 は、既存の40機のファイアフライを標的ドローンに改造したものです。また、シービクセンは無人機として4機がD.3規格に改造されました。
予算の潤沢な米軍では、退役機や旧型の現役機(F-4 ファントムII、F-16 ファイティングファルコンなど)を、米空軍、海軍、海兵隊のフルスケールの航空標的として遠隔操作できるよう改造することが多いです。
実物大空中目標(Full-scale aerial target)
実際の航空機に無線遠隔制御装置を搭載して運用するのは自然な発想だと思います。実際、退役した戦闘機を無人化して実物大空中目標として訓練に使ってきました。アメリカ軍では、退役したF-100、F-104、F-106、F-4などを無人機化したQF-100、QF-104、QF-106、QF-4などを運用しています。
1981年1月、フロリダ州のティンダル空軍基地上空で、YQF-100Dが初飛行しました。1983年には200機以上のF-100 D&Fモデルのスーパーセイバーが、QF-100標的無人機に改造されました。標的の無人機は、撃墜される前に約10回のミッションを行うことを目的としていました。QF-100に向けて発射されたミサイルは、スーパーセイバーをかすめるようにプログラムされ、機体の再利用を可能にしました。QF-100の「パイロット」は、コンピューターデスクに座り、独自のジョイスティックを使って、15マイル圏内から遠隔操作システムにより制御することができました。その後も、退役した機体がターゲットドローンとして活用されています。

QF-16 unmanned aerial target drone on its first unmanned flight over the Gulf of Mexico on 19 September 2013. The QF-16 is from the 82nd Aerial Targets Squadron.
QF-16 は第 82 空中標的飛行隊所属
2013 年 9 月 19 日にメキシコ湾上空で初の無人飛行を行う QF-16 無人空中標的ドローン
MSgt. J. Scott Wilcox, Public domain, via Wikimedia Commons
2013年、ボーイングとアメリカ空軍は、フロリダ州ティンダル空軍基地でQF-16フルスケール空中目標の初の無人飛行を行いました。QF-16は、アメリカの戦闘機の次世代の戦闘訓練とテストのために、退役したF-16をフルスケールの空中目標に改造したものです。新しく開発された兵器や戦術をテストするために利用されました。QF-16は、それまでのQF-4艦隊を置き換え、より高性能な第4世代機として、今日的な標的と脅威をより代表する空中目標として活用されました。
日本でも1987年に、用途廃止となった航空自衛隊のF-104を無人機化した標的機(UF-104J)のプロジェクトが始まりました。1990年に2機の試作機の改修を完了し、1992年から12機の量産機の製造を行い、1994年3月から硫黄島基地で運用が開始されました。UF-104Jは航空自衛隊初の実機サイズの無人標的機で、保管されていたF-104Jから14機が改修されました。
1995年3月に初の実弾射撃が行われ、全国の基地から派遣されたF-4EJやF-15Jによって3機が撃墜されました。その後も何機かが撃墜され、1997年3月に硫黄島の最後の1機が撃墜されてUF-104Jの運用は終了しました。これにより、硫黄島の無人機部隊も同月に廃止されました。2023年現在、航空自衛隊は実機を改造した無人標的機を運用していません。
ターゲットドローン専用機
Aerial Target, Airspeed Queen Wasp, de Havilland Queen Bee, DRDO Abhyas,DRDO Fluffy, DRDO Lakshya, DRDO Ulka, Denel Dynamics Skua,Meggitt Banshee, Aisheng Drone-2, GAF Jindivik, GAF Turana, MQM-170,TAI Şimşek,Lockheed AQM-60, Kingfisherm, BQM-34 Firebee, BQM-74 Chukar, BQM-167 Skeeter, Nord CT41,
Karrar (UCAV), NCSIST Spark,
実機改修
Curtiss Queen Seamew, de Havilland Vampire, Fairey Queen, Miles Queen Martinet, QB-17 Flying Fortress, QT-33 Shooting Star, QB-47 Stratojet, QF-86 Sabre, QF-100 Super Sabre, QF-102 and PQM-102 Delta Dagger, QF-106 Delta Dart, QF-4 Phantom II, QF-16 Fighting Falcon, QF-9 Cougar,
アメリカ空軍のF-106デルタダートが水平飛行で巡航中、背後から別の米空軍機が空対空ミサイルを発射しました。F-106はミサイルを回避するため急旋回を行い、対抗手段のフレアを放ちましたが、ミサイルは正確に追尾し、F-106を真っ二つに割りました。火の玉から破片が降ってきましたが、パラシュートはありませんでした。なぜ米軍の戦闘機が別の戦闘機を撃墜したのでしょうか。
これは、アメリカ空軍の現役最後のデルタダートを、兵器実験のための実物大空中標的機(FSAT)として飛行させている第82戦術航空標的飛行隊(TATS)の日常の光景でした。米国の法律により、ミサイルシステムは本格生産に入る前に有効性テストを受けなければなりません。空対空ミサイルや地対空ミサイルの場合、戦闘態勢の整った航空機を標的に発射する必要があります。この目的で現役の有人機を使用するのは、コストと危険が高いため、標的には無人のFSATドローンを使用していました。新しい兵器システムの誕生のために、最後の大役を果たしながら破壊されていったのです。QF-106の「Q」は、ドローンへの改造を意味します。
1986年に、194機のデルタダートを改造する主契約者としてフライトシステムズ社(FSI)が選定されました。最後の機体がアリゾナ州の基地に引き渡される3年前から、FSIはQF-106Aターゲットドローンへの改造を開始し、1990年から1998年まで「ペイサーシックス」計画として実施されました。
改造機の初飛行は1987年7月に行われましたが、残りの改造は遅れ、1990年になって完了しました。
QF-106は1991年末からニューメキシコ州とフロリダ州の発射場を拠点に、FSATとして運用を開始しました。典型的なミッションは、赤外線ホーミングミサイルの標的となることでした。QF-106には主翼下にバーナーを装着して赤外線放射源としましたが、敵が我が機をより魅力的な標的にするためにバーナーを装着してくれることはないでしょう。
しかし、QF-106は空対空ミサイルとの交戦を繰り返しながらも、1機ずつ破壊されるまでの時間をできるだけ長くすることが計画の意図でした。QF-106の最後の撃墜は、1997年2月にホロマン空軍基地で行われました。
生産された機体の約2/3にあたる199機がフロリダ州の基地の第82戦術航空標的飛行隊で、QF-106エリアルターゲットドローンに改造され、費やされました。
米空軍「フルスケール航空標的」ドローンプログラムの歴史
1970年代初頭、米空軍は対空兵器の実戦的な標的をテストするために、「フルスケール航空標的」(FSAT)プログラムを開始しました。これは脅威となる航空機と同等のサイズと性能を持つ標的機を提供することを目的としています。そのため、ゼロから新規に製造するのではなく、保管されている米空軍の戦闘機を再利用することにしました。
古い軍用機は、維持費が高騰したり性能が陳腐化したりすると、他国に売却したり、部品取りにするか、アリゾナ州ツーソンのデービスモンサン空軍基地の航空機保管場「ボーンヤード」に保管されます。この保管機がFSATプログラムのベースとなりました。
最初の標的機は、1974年頃から1984年頃まで飛行したF-102 デルタ・ダガーです。1950年代の戦闘機で、限られた数しか製造されませんでした。1983年頃からF-100 スーパーセーバーに置き換わり、1991年にはF-106 デルタダートがFSATとして運用開始しました。1998年初めにフロリダ州の基地で最後のF-106が飛行し、1996年からはF-4 ファントムIIが、2014年からはF-16 ファイティング・ファルコンがFSATとして運用されています。
遠隔操作が可能なよう改造された旧式の戦闘機や迎撃機は、呼称の前に無人機を示す「Q」が付与されます。QF-102、QF-100、QF-106、QF-4、QF-16などです。これらの機体は、AMARCのスタッフにより保管庫から出され、飛行可能な状態に整備されます。その後、遠隔制御装置が取り付けられ、遠隔操縦飛行の試験が行われた上で、米空軍のFSATとして承認を受けます。
写真・映像伝送技術と偵察機としての利用
第二次世界大戦後、無人航空機は主に偵察任務に利用されるようになりました。Radioplane社は戦時中に米陸軍のための標的機を製造していましたが、その技術を使って、戦後に写真機や映像伝送装置を搭載したSD-1を開発し(1955年)、米陸軍が運用しました。30分の遠隔操縦の後に帰還し、パラシュートで回収する仕組みでした。
Lightning Bug 偵察用無人航空機 (1960~70 年代)
Fire Fly(Ryan Model147A)実験機が、標的機(Ryan Q-2C Firebee)の技術を使って開発され(1962年)、巡航高度17km、航続距離1930kmという高い飛行性能を実現しましたが、誘導はタイマーとジャイロコンパス、高度計という単純な仕組み(推定航法)で、精度は高くありませんでした。その後、飛行性能を向上させたLightning Bugシリーズが1964年に開発され運用されました。様々な派生型が開発されましたが、量産型はドップラー航法装置を搭載していました(Ryan Model 147SC等)。これは地表にレーダーを照射し、反射波のドップラーシフトを計測することで自機の対地速度を得る仕組みです。
航法技術の発展による長時間・長距離化
電波航法技術の適用
政治的な事情で低高度侵入偵察ミッションの要求が高まると、それまでの高高度偵察では許容できた航法精度の問題が深刻化しました。低高度では撮影可能範囲が狭くなるため、航法精度が悪いと目標を捉える確率が大幅に低下します。解決策の一つとして、長距離電波航法のLORAN-C(Long Range Navigation)が一部機種に採用されました(1972年、Ryan Model 147 SDL)。これは地上の固定局からのパルス波の時間差を利用する船舶や航空機向けの電波航法システムで、誤差が飛行時間に依存しないため、長時間・長距離飛行に適しています。ジャイロやドップラー航法に比べて格段に高精度な航法が可能でした。
慣性航法技術の実用化と無人航空機への利用
1950年代に開発された慣性航法装置(INS)は、ジャイロで安定化したプラットフォームに加速度センサを搭載し、その出力を積分して位置変化を得る技術です。1969年に運用開始のD-21BはINSを搭載し、電波航法が利用できない地域での長距離飛行の誘導に用いられました。
リングレーザージャイロを使った慣性基準装置(IRS)は、従来の機械式INSと比べて精度が優れ(1時間での誤差は1海里未満)、メンテナンスフリーなどの利点があります。1980年代以降、IRSは民間機にも搭載されるようになりましたが、高価なためUASへの適用は一部の長時間滞空型機に限られています。衛星航法の方が精度が高いですが、電波受信不能時の補助として、慣性航法は依然として重要な技術です。
ミッションの変化と小規模UASの出現
世界の政治情勢の変化に伴い、UASに求められる任務も変化しました。それまでの戦略的な高速偵察機に加えて、比較的低速・低高度で運用する戦術的UASへの需要が高まりました。このニーズに応えるべく、1986年に運用が開始されたRQ-2 Pioneerが導入されました。イスラエルのIAI社が小型のリアルタイム映像伝送可能なUASを実用化していましたが、米AAI社がIAIと共同開発し、米海軍が導入しました。艦載機として艦砲射撃の着弾観測に用いられ、湾岸戦争では偵察任務にも利用されますなど、その有用性が広く認識されました。その後の対テロ戦争で、小規模UASの重要性が一層高まりました。
衛星航法と衛星通信による Over the Horizon System
1970-80年代、米国ではCondor、Compass Cope、Amberなどの大型滞空型実験機が開発されましたが、米軍には採用されませんでした。ステルス戦闘機の実用化により無人機への需要が低下したことや、米空軍における無人機の重要性が相対的に低下していたことが背景にあります。
一方、CIAも無人機を実験しており、Amberに注目しこれをベースにRQ-1 Predatorを開発、1995年に運用を開始しました。中高度長時間滞空型(MALE)に分類されます。
1978年から打ち上げられたGPS衛星によるGPS航法は1993年に24機体制が整い、飛躍的に高精度な航法が可能になりました。RQ-1はGPS航法を用いることで、地球上のどこでも高精度な航法が実現しました。さらに衛星通信機能により、見通し外(RLOS)運用も可能なOver the Horizon Systemとなり、現代の大型UASの基本型と言えます。これらの技術により、操縦者との制約のない通信(画像・データ・制御情報のやり取り)が実現したため、開発者のエイブラハム・カレム(Abraham Karem)はUASの父と呼ばれています。
高度な自動化システムの実現

An RQ-4 Global Hawk unmanned aircraft like the one shown is currently flying non-military mapping missions over South, Central America and the Caribbean at the request of partner nations in the region.
示されているような無人航空機 RQ-4 グローバル ホークは現在、この地域のパートナー国の要請に応じて、南、中米、カリブ海上空で非軍事的な地図作成ミッションを飛行しています。
U.S. Air Force photo by Bobbi Zapka, Public domain, via Wikimedia Commons
1998年に初飛行したRQ-4 Global Hawkは、ほぼ完全自動運用が可能な高高度長時間滞空型(HALE)UASです。巡航高度は通常の航空機が飛行しない高高度(最大19.8km)で、他の航空機が飛行しない制限空域内での運用では、滑走路へのタキシングから離陸、上昇、ウェイポイント飛行、降下、着陸、駐機場への移動まで全て自動で実行できます。
1970年代、アメリカ陸軍はAquilaプログラムで、4人の兵士が運べる小さい戦術用無人機の開発を目指しました。しかし、自動操縦装置などの小型化技術が不十分だったため、1987年にこの計画は中止になりました。その後1990年代になると、様々な技術が大きく進歩し、小型無人機の実用化への道が開けました。
電子技術の発展:センサの小型化・高精度化 進むドローンの小型化
1990年代から2000年代にかけて、マイクロ エレクトロ メカニカルシステム(MEMS:Micro Electro Mechanical Systems)技術により、ジャイロセンサーや加速度センサーが劇的に小型化・低価格化しました。現在では、スマートフォンやゲームコントローラーなどの身近な電気製品に組み込まれるようになりました。また2000年には、GPSの測位精度を意図的に下げる操作(SA: Selective Availability)が解除され、民間でも高精度な位置測位が容易に利用できるようになりました。これらの技術を活用したGPS/INS複合航法技術が発展し、小型軽量な装置で高い航法精度が得られるようになったことが、ドローンの小型化につながりました。
小型無人航空機の実用化
2000年代に入り、これまで説明した要素技術が急速に進歩したことを受けて、さまざまな小型無人航空機が開発されるようになりました。2001年に初飛行したAeroVironment社のRavenは、重量が2kg程度の小型固定翼機ですが、GPSによる自律飛行とリアルタイムの映像伝送が可能で、アメリカ陸軍などに採用され、2万機近くが量産されています。
小型化する自爆突入型ドローン 徘徊ミサイル
スイッチブレード 600
Switchblade 600は、次世代の長距離型無人機(ドローン)です。高性能な光学系、40分以上の長時間飛行能力、遠距離の目標を攻撃できる対装甲弾頭を備えています。
Switchblade 600は、ミッションの準備と実行に必要なすべての機能を搭載したオールインワンポータブルソリューションです。10分以内にセットアップし運用を開始できます。高解像度のEO/IRセンサーと高度な飛行制御システムを搭載しているため、筒型の発射装置から素早く容易に展開でき、視界外の目標や装甲車両を探知、追跡、攻撃する能力があります。特許取得済みの中止と再攻撃機能により、オペレーターはいつでもミッションを中止し、同じまたは別の目標を再度攻撃することができます。
Switchblade 600は、固定陣地、精密射撃能力を持つ戦闘車両、空中発射など、フィールドコマンダーに多目的な長距離ドローンシステムを提供します。
Switchblade 600データシート
民生ドローン(無人航空機)の歴史
- 1987年 YAMAHAより農薬散布ラジコン「R-50(L092)」エアロロボット・ヤマハが発売。
- 1989年にキーエンス社がジャイロソーサーを開発。日本のキーエンス社は、機械式のジャイロを搭載して、ニッカド電池でプロペラを駆動させた画期的な電動マルチコプターを開発。
- 1999年(カナダ)のDraganfly Innovations社、で電動マルチコプターを販売。
- 1999年 米国のArea 51 Technologies 社はHMX-4 を発売した。
- 2006年 ドイツのMikroKopter社 から電動マルチコプターが販売
- 2006年(ドイツ)microdrones社で md4-200 電動マルチコプターを販売。
- 2010年(フランス)パロット社が、ARドローン発売。ARドローンは、おもちゃとして広く普及。それまで産業用のものが主流だったドローンが一般人でも簡単に入手、飛行できるようになった影響は大きく、この製品が今日のドローンブームのきっかけとなりました。
- 2012年(中国)DJI社がFhantomシリーズを発売。Fhantomシリーズは、世界的に普及。カメラ搭載ドローンが世界シェアの7割以上を占めるようになりました。
- 2013年(米国)3D Robotics社がIris発売
- 2013年12月、アマゾンがマルチコプターによる配送サービス「Amazon Prime Air」の構想を発表。
- 2015年4月、首相官邸にドローン落下、テロ対策の弱点が顕在化。
- 2016年3月、幕張メッセで「Japan Drone 2016」開催。
- 2016年5月、重要施設の周辺地域の上空における小型無人機等の飛行の禁止に関する法律が施行される。
- 2017年、KDDIが実証実験としてLTEを用いた長距離目視外飛行に成功しました。
「スマートドローン」と呼ばれるオクトコプターにて目視外長距離飛行(総距離6.3 km)を行いました。
電動の小型マルチコプターは、1980年代から名古屋大学などの研究機関や一部の愛好家の間で細々と開発が進められていましたが、当時は軽量かつ高容量のバッテリーや高出力の電動機が入手困難で、加えて姿勢制御が必要だったため、一般の愛好家が飛ばすことは難しい物でした。1989年にキーエンスからジャイロソーサーが発売され、これが契機となり、それまで垂直離着陸機を飛ばしたことのない人でも比較的簡単に飛ばせるようになりました。当時搭載されていたジャイロスコープは、モーターでコマを回転させる形式でした。その後、改良が進み、2000年代以降、スマートフォンなどに使われるMEMSジャイロスコープや加速度センサーが大量生産され廉価になったことで、これらを搭載したマルチコプターが普及しました。




{kind=link}
{kind=link}